Satellite orbit around the earth
The CNES has been a great user of Scilab, and a long-term partner of us. Upon their advice, we presented one of their use case at the the 6th International Conference on Astrodynamics Tools and Techniques (ICATT).
The question is a classical problem of space mechanics solved step-by-step, to demonstrate the capacities of Scilab in this field:
Download the script (myEarthRotation - PDF)
Download the full tutorial (Scilab Orbite Simulation - PDF)
1. Express the physics problem
The problem is based on the universal law of gravitation:

We write down Newton’s second law of motion in an earth-centred referential:
(1)

(2)
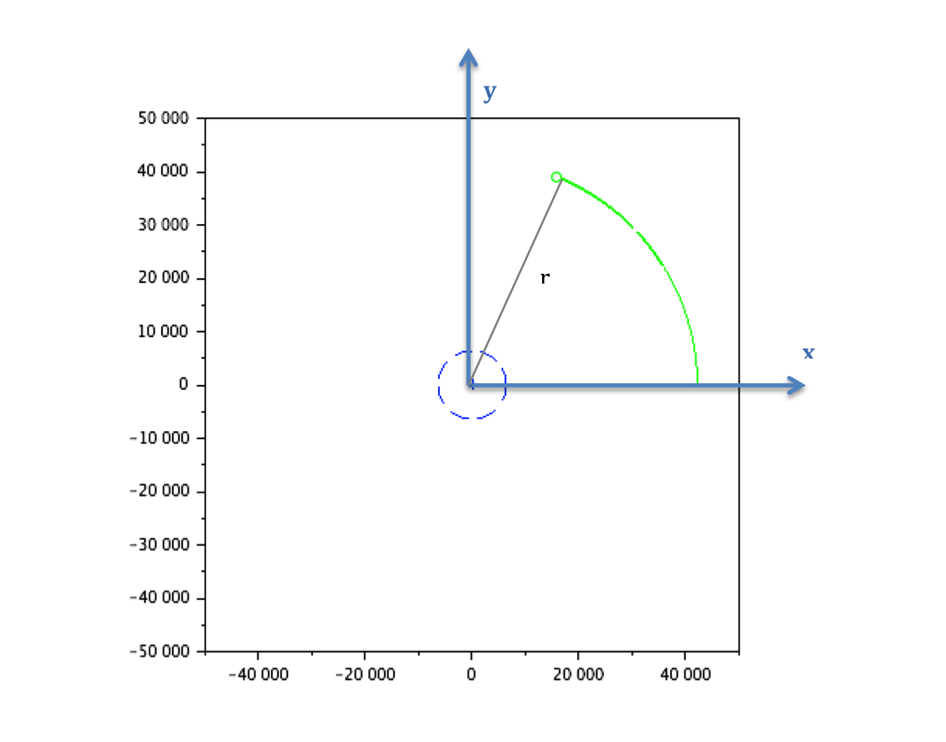
Position of the satellite is at a distance r [x; y]
Earth mass centre is at O [0; 0]
Gravitational constant:

Mass of the earth:

Radius of the Earth:

-
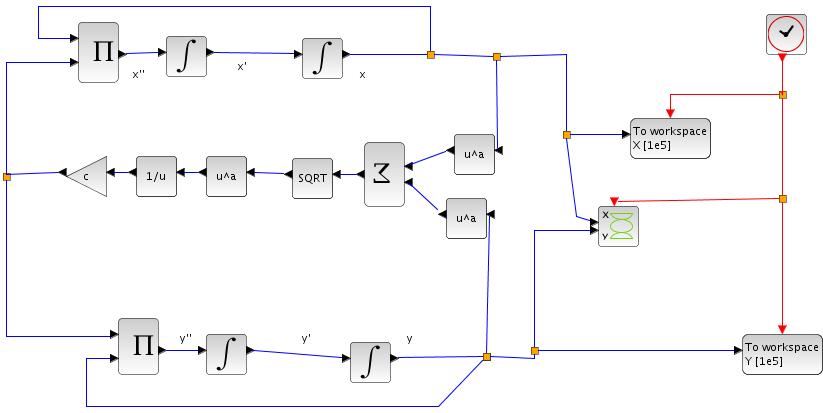
Translate your problem into Scilab
Scilab is a matrix-based language. Instead of expressing the system as set of 4 independent equations (along the x and y axis, for position and speed), we describe it as a single matrix equation, of dimension 4×4:
This method is a classical trick to switch from a second order scalar differential equation to a first order matrix differential equation.

with


To simplify the equation, we define the variable:

Open scinotes with edit myEarthRotation.sci
Define the skeleton of the function:
function udot=f(t, u)
G = 6.67D-11; //Gravitational constant
M = 5.98D24; //Mass of the Earth
c = -G * M;
r_earth = 6.378E6; //radius of the Earth
r = sqrt(u(1)^2 + u(2)^2);
// Write the relationhsip between udot and u
if r < r_earth then
udot = [0 0 0 0]';
else
A = [[0 0 1 0];
[0 0 0 1];
[c/r^3 0 0 0];
[0 c/r^3 0 0]];
udot = A*u;
end
endfunction
The condition defined by the distance r of the satellite with the centre of earth stops the simulation if it’s colliding with earth’s surface.
Try out the final script with the following initial conditions in speed and altitude:
--> geo_alt = 35784; // in kms --> geo_speed = 1074; // in m/s --> simulation_time = 24; // in hours --> U = earthrotation(geo_alt, geo_speed, simulation_time);
3. Compute the results and create a visual animation
With this function, we go to the core of the problem:
function U=earthrotation(altitude, v_init, hours)
// altitude given in km
// v_init is a vector [vx; vy] given in m/s
// hours is the number of hours for the simulation
r_earth = 6.378E6;
altitude = altitude * 1000;
U0 = [r_earth + altitude; 0; 0; v_init];
t = 0:10:(3600*hours); // simulation time, one point every 10 seconds
U = ode(U0, 0, t, f);
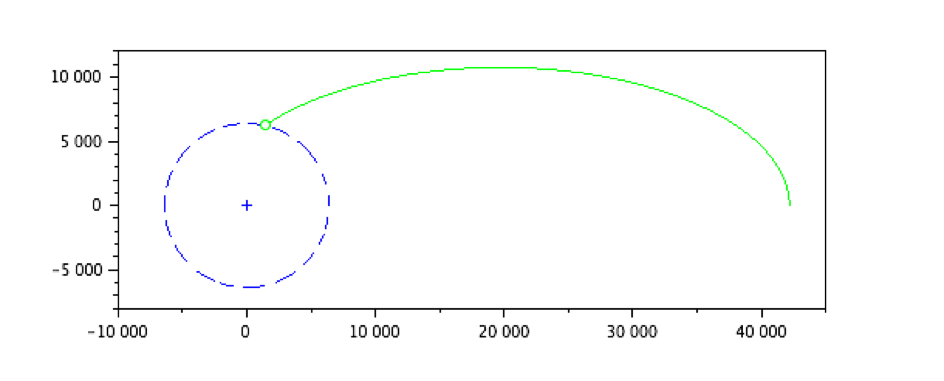
// Draw the earth in blue
angle = 0:0.01:2*%pi;
x_earth = 6378 * cos(angle);
y_earth = 6378 * sin(angle);
fig = scf();
a = gca();
a.isoview = "on";
plot(x_earth, y_earth, 'b--');
plot(0, 0, 'b+');
// Draw the trajectory computed
comet(U(1,:)/1000, U(2,:)/1000, "colors", 3);
endfunction
The resolution of the ordinary differential equation (ODE) is computed with the Scilab function ode.
ode solves Ordinary Different Equations defined by:

where y is a real vector or matrix
The simplest call of ode is: y = ode(y0,t0,t,f) where y0 is the vector of initial conditions, t0 is the initial time, t is the vector of times at which the solution y is computed and y is matrix of solution vectors y=[y(t(1)),y(t(2)),…].
Go further
To go further in numerical analysis, find out more about the solvers:
Ordinary Differential Equations with Scilab, WATS Lectures, Université de Saint-Louis, G. Sallet, 2004