Model-based Design of an Enhanced Ground Proximity Warning System
Download the White Paper about the use of the ARGO toolchain by DLR:
Scilab DLR White Paper ARGO – Model-Based Design of Heterogeneous Parallel Systems

An Enhanced Ground Proximity Warning System is a flight system (a supervisory controller) that creates visual and aural warnings in order to avoid Controlled Flight into Terrain.
The functions of the system are to create aural and visual warnings in case of:
- Excessive rate of descent
- Excessive terrain closure rate
- Altitude loss after Take-Off or Go-Around
- Unsafe terrain clearance when not in landing configuration
- Excessive deviation below glideslope
- Enhanced terrain awareness functions such as Terrain Awareness Display and Terrain Clearance Floor
Since 1974, the FAA has required all large turbine and turbojet airplanes to install GPWS equipment. Here is a list of some of the existing solutions on the market:
Challenges
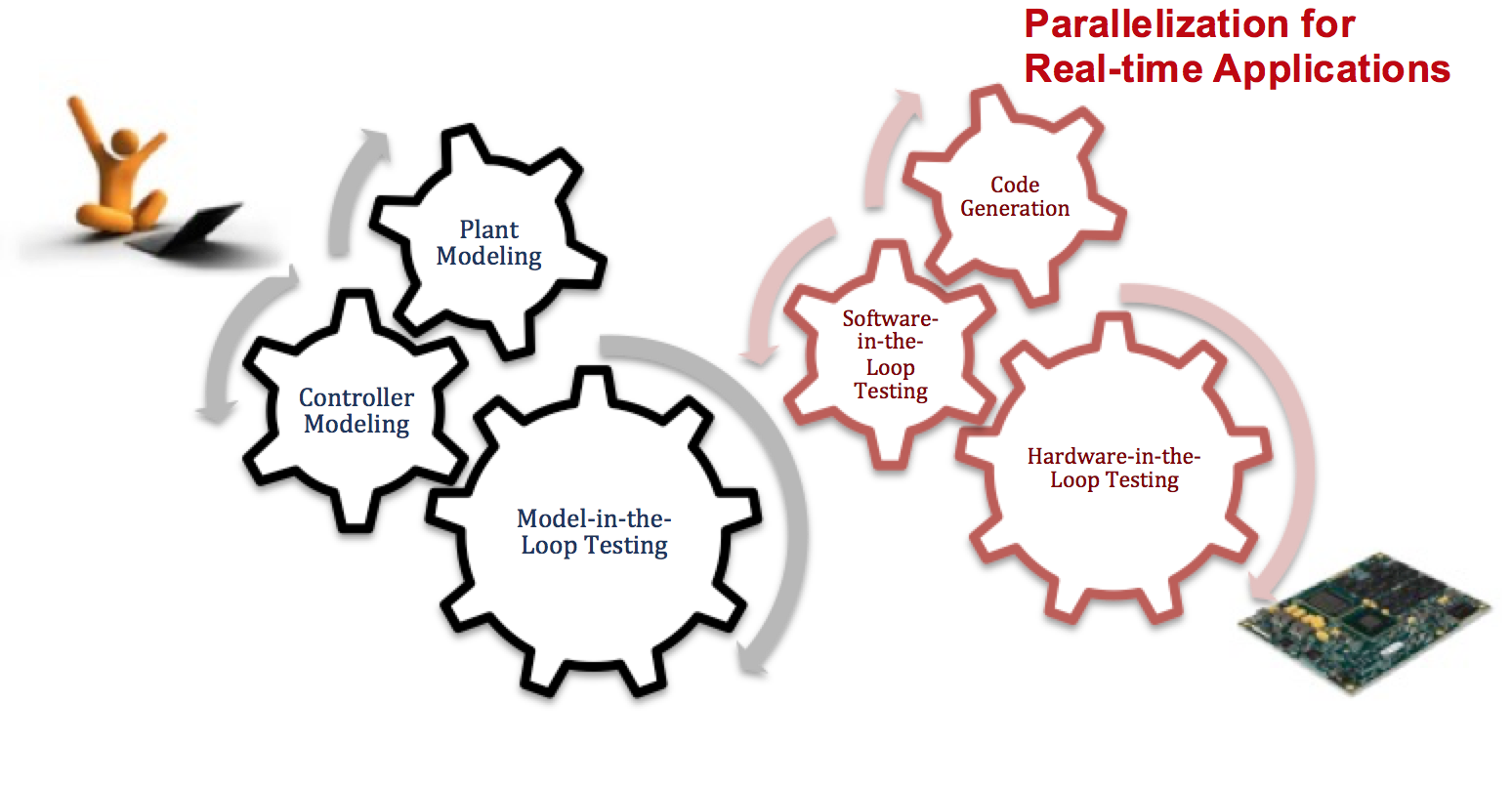
As many other cyber-physical system domains, the aerospace domain is also looking into ways to utilize heterogeneous multi-core computing platforms. However, parallel programming of heterogeneous multi-core targets for time-critical embedded applications suffers from a complex toolchain and programming process. Worst Case Execution Time (WCET)-aware development capable of maintaining safety levels and programmability is the key challenge. While the development shares similar plant modelling, controller modelling and Model-in-the-Loop (MIL) testing steps with the classical model-based design workflow, the parallelization for real-time applications requires innovative approaches for code generation, Software-in-the-Loop (SIL) and Hardware-in-the-Loop (HIL) testing steps for an efficient and cost-effective development process.
Model-based Design Workflow
Solution
The ARGO (WCET-Aware Parallelization of Model-Based Applications for Heterogeneous Parallel Systems) research project will address this challenge with a holistic approach for programming heterogeneous multi- and many-core architectures using automatic parallelization of model-based real-time applications. ARGO will enhance WCET-aware automatic parallelization by a cross-layer programming approach combining automatic tool-based and user-guided parallelization to reduce the need for expertise in programming parallel heterogeneous architectures. The ARGO toolchain will translate model-based Scilab/Xcos applications into multi-core optimized C code with guaranteed real-time constraints.
ARGO Workflow:
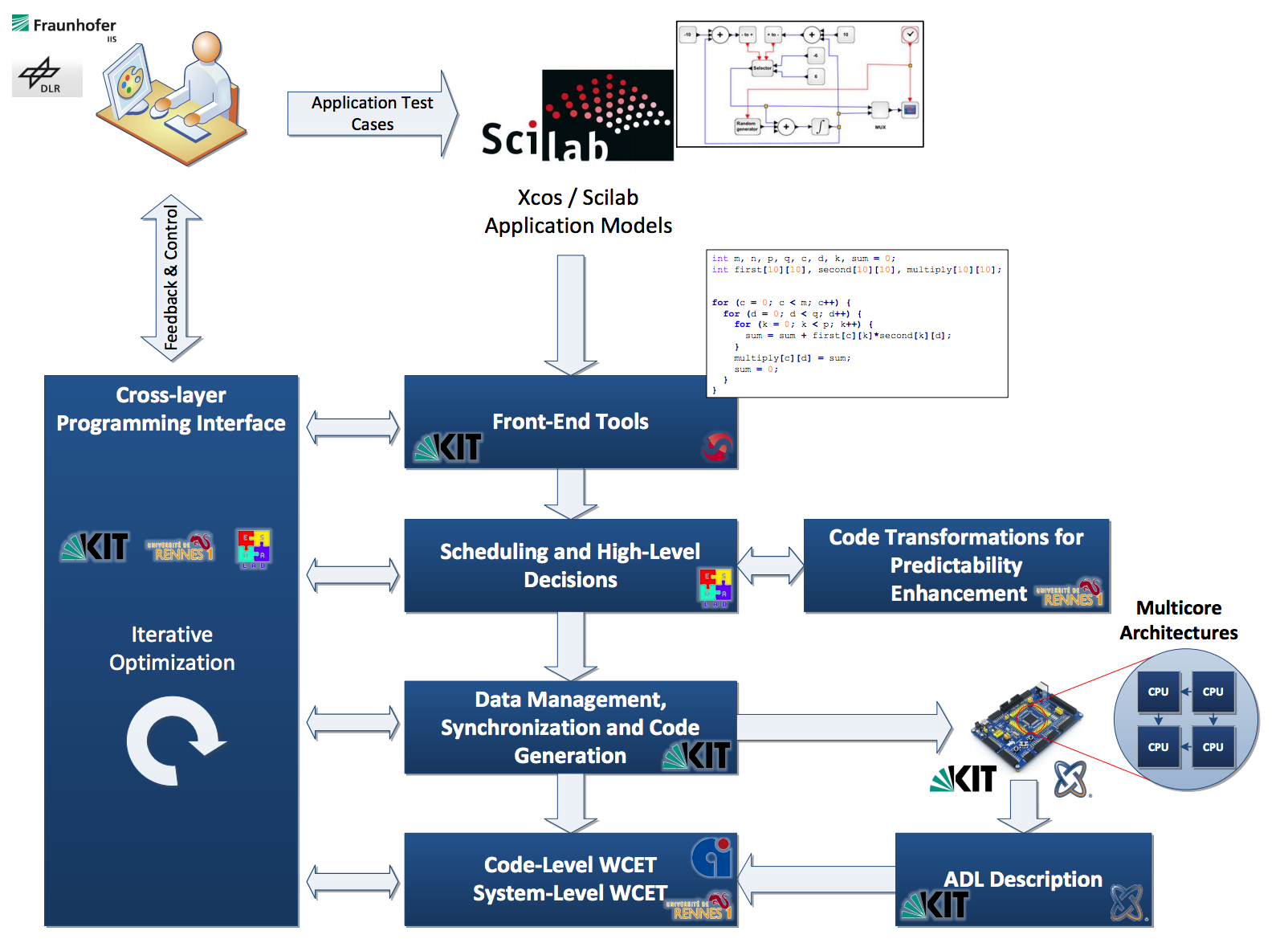
The EGPWS developed in the frame of the ARGO Project is utilizing the ARGO Workflow. The design model of the ARGO EGPWS as well as an Airbus A320 plant model is being developed using Scilab/Xcos.
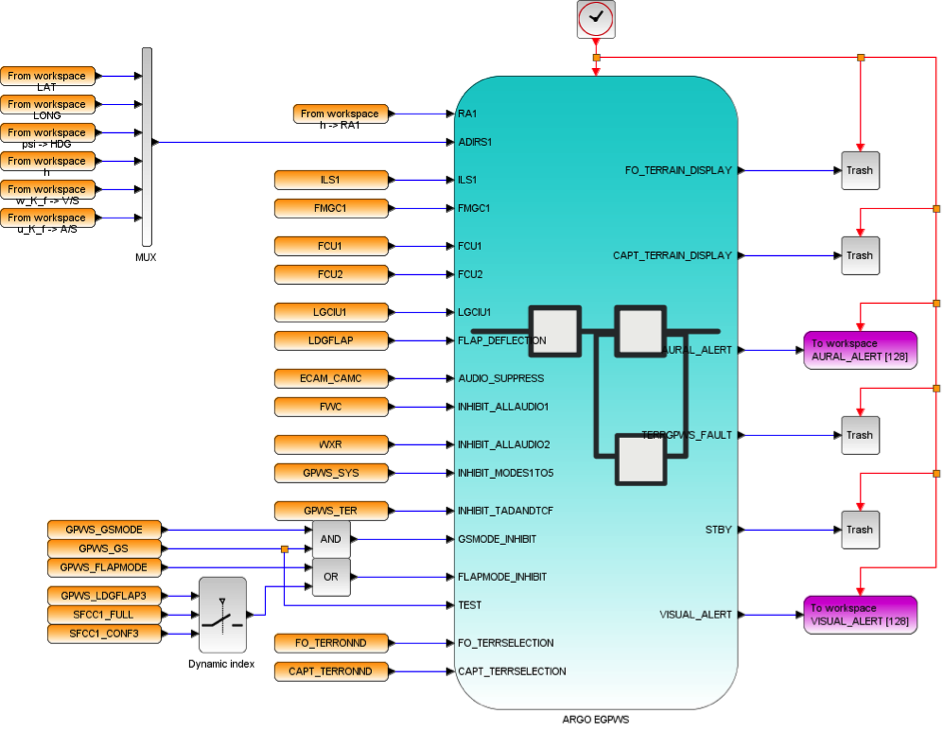
After conducting MIL in a Scilab/Xcos environment, SIL and HIL testing are being conducted using the automated code generation utilities of the ARGO toolchain. Auto-generated code is deployed on a multi-core FlexaWare® target platform from Recore Systems.

The last step of HIL testing is being planned as Pilot-in-the-Loop testing in German Aerospace Center (DLR) Air Vehicle Simulator (AVES). ARGO EGPWS is being integrated into the overall AVES infrastructure.
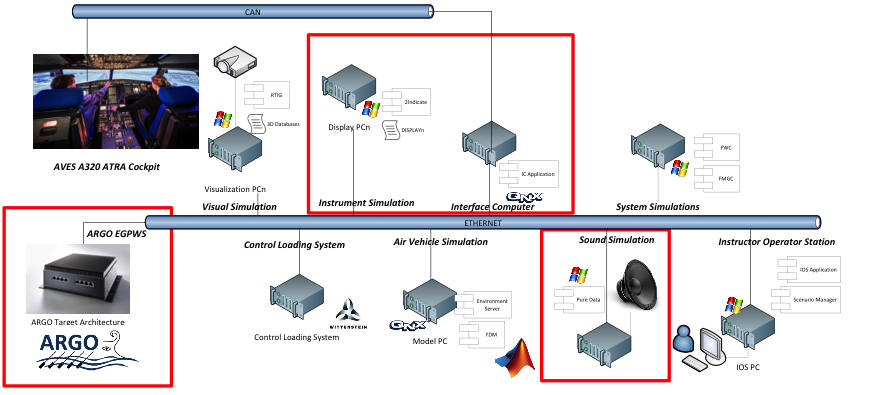
AVES is a state-of-the-art research flight simulator with unique capabilities:
- Level D quality cockpits of Airbus A320 and Eurocopter EC135
- Electro-mechanically driven motion system
- Roll-on Roll-off (RoRo) cockpit exchange system
- Open architecture software platform using the latest simulation technologies
- Integrated workflow for investigation of complex systems integration problems as well as the dynamic interaction between pilot and air vehicle
Results
During the different phases of a systems development project, the efforts are spread in the following activities that can be shortened thanks to model-based design approaches:
- Requirements
- Design
- Implementation
- Test
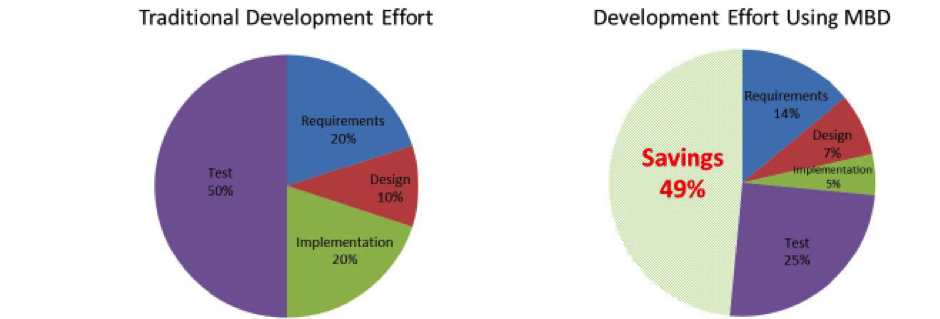
Source: Amundson, I., Shipton, L., Liu, A., & Nowak, M. (2015). Toward Efficient Model-Based Development of Aerospace Applications. In 15th AIAA Aviation Technology, Integration, and Operations Conference (p. 2741).
For the development of multi-core applications, the ARGO toolchain aims at keeping up with the efficiency that is provided by classical model-based design tools for single core applications. Therefore the ARGO EGPWS is partially being developed using other commercial-off-the-shelf model-based design tools for comparison. Current evidence indicates that the development effort is comparable.
Read further
Download the complete scientific paper:
Model-based Development of Enhanced Ground Proximity Warning System for Heterogeneous Multi-Core Architectures
Last article
Download the paper presented at the conference ERTS 2018:
Interactive Parallelization of Embedded Real-Time Applications Starting from Open-Source Scilab & Xcos
More infos
http://www.dlr.de/ft/en/desktopdefault.aspx/tabid-1387/1915_read-38610/
http://scilab.io/use-cases/real-time-embedded-systems-require-higher-pe…
The ARGO Project
The goal of the ARGO (WCET-Aware Parallelization of Model-Based Applications for Heterogeneous Parallel Systems) research project is to develop a toolchain which translates model-based Scilab/Xcos applications into multi-core optimized C code with guaranteed real-time constraints.
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 688131
