Identification and LQG control for a pre-compensated multi-axis piezo driver
This article was gladly contributed by Luca Cavanini, Luigi Colombo, Gianluca Ippoliti, Giuseppe Orlando, from the Dipartimento di Ingegneria dell’Informazione, Universita Politecnica delle Marche, 60131 Ancona, Italy
Email: {l.cavanini, g.ippoliti,
Challenge
Positioning Piezoelectric Actuators (PAs) are extremely versatile high precision investigative tools exploited in the field of micro-nanotechnology and they are also widely used in highly accurate industry production. PAs systems require appropriate controllers allowing to obtain fast and high-precision positioning performances but usually commercial systems provide integrated Proportional-Integral (PI) controllers providing standard performances also in the presence of uncertainty and disturbance. Those PI controllers usually are not tunable or adjustable on the considered plant, limiting controlled system performances with respect to nominal PAs features.
These PI controllers are often provided in an analog implementation in order to not introduce delays in system response, but usually they cannot be easily tuned on the considered system, and obtained control performances do not reflect nominal features.
Solution
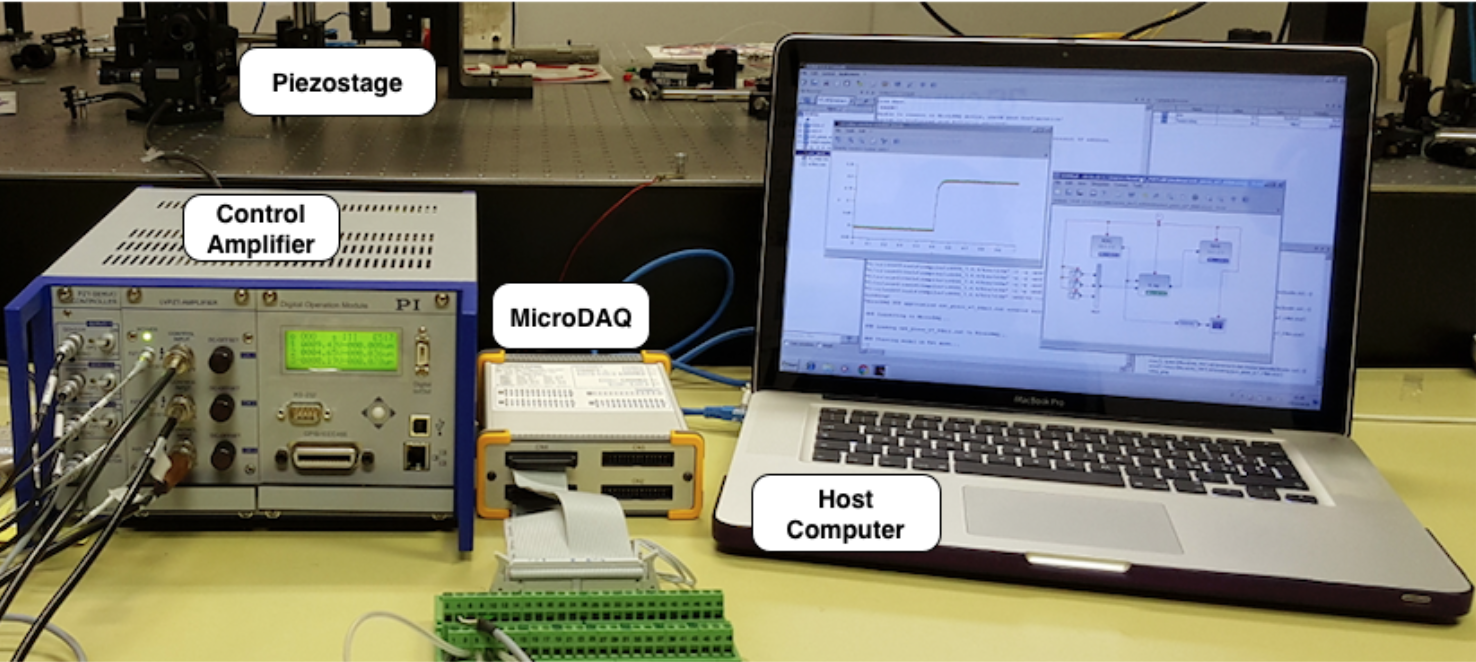
Due to the PAs linear behavior, the pre-compensated plant is identified by input/output data acquired with the MicroDAQ (with a sample time of 20 kHz) in the form of a Linear Time-Invariant (LTI) system. A Linear Quadratic Gaussian (LQG) controller, including a Kalman Filter (KF) for the estimation of the identified system state, has been developed and tested in the Xcos simulation environments. Thanks to the flexibility of MicroDAQ toolbox in easy integration of custom C/C++ code, the proposed controller has been compiled and imported into the MicroDAQ for real-time tests on the PA.
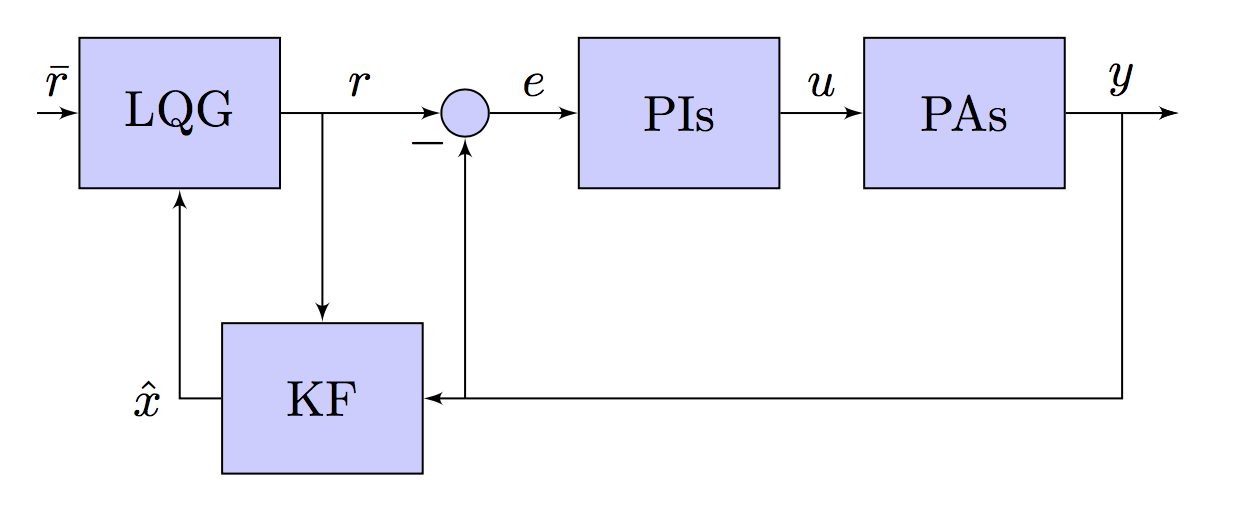
LQG+PI control scheme of the pre-compensated PAs system
Results
Through the real-time implementation pre-compensated system performances have been improved. Experiments consider step response tests and the results present the reduction of the Integral Square Error (-60%), the rise time (-25%) and the settling time (-29%).
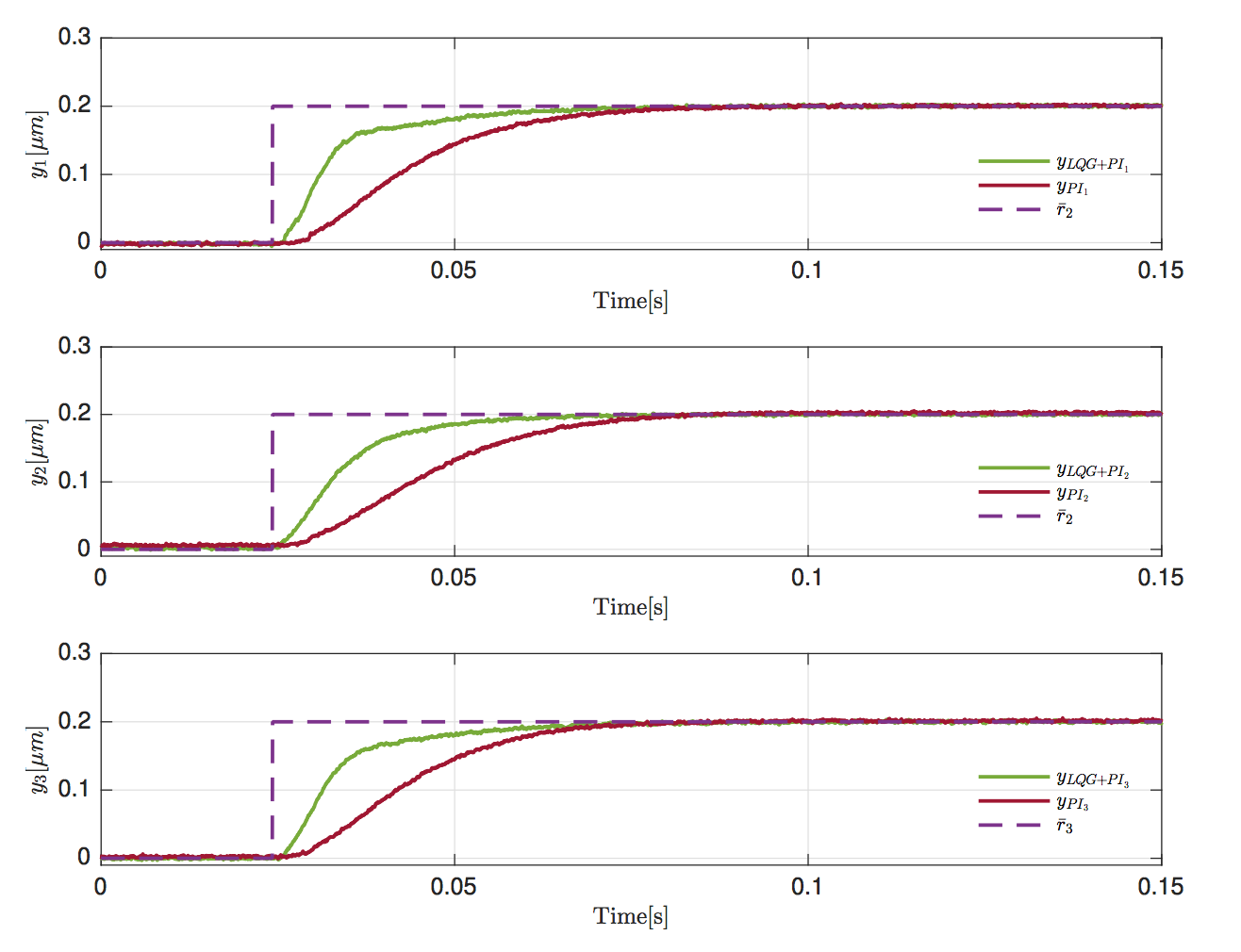
Experimental results, comparison between PI and LQG+PI control efforts. From top to bottom: X axis controlled reference computed by LQG+PI and PI reference r ̄1; Y axis controlled reference computed by LQG+PI and PI reference r ̄2; Z axis controlled reference computed by LQG+PI and PI reference r ̄3.